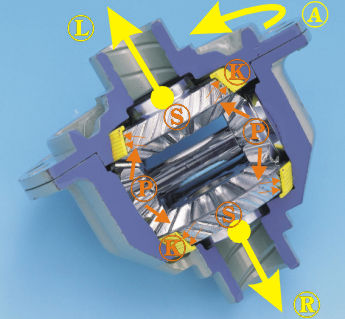
Super LSD im Schnitt

Konus (K) und Seitenrad (S) im Detail
Das SuperLSD Sperrdifferenzial (Handelsname von GKN / TFS) ähnelt im Aufbau einem normalen Differenzial.
|
|
|
Super LSD im Schnitt |
|
|
Konus (K) und Seitenrad (S) im Detail |
Gehen wir für die Beschreibung davon aus, dass diese Sperre in einem Fahrzeug mit Heckantrieb eingebaut ist.
Das Differenzial wird bei (A) angetrieben, dort befindet sich beispielsweise ein Tellerrad, welches über eine Kardanwelle mit dem Getriebe verbunden ist.
Die Räder werden über (L) und (R) angetrieben, dies sind die beiden Ausgänge des Differenzials.
Durch das Gehäuse werden die Planetenräder (P) mitgenommen, die wiederum die Seitenräder (S) antreiben.
In den Verzahnungen entstehen durch das Antriebsmoment (A) innere Kräfte (dargestellt durch Pfeile), welche die Seitenräder (S) nach außen, also zu den Rädern in Richtung von (L) bzw. (R) drücken.
Die Seitenräder (S) wiederum stützen sich am Konus (K) ab.
Der Konus (K) dreht sich mit der Geschwindigkeit des Gehäuses, während sich die Seitenräder (S) mit der Geschwindigkeit des jeweiligen Rades drehen.
Wenn beide Räder gleich schnell drehen, dann läuft das SuperLSD als Block um, d.h. es bewegt sich im inneren des Differenzials nichts, es gibt keine Reibung und keine Verluste.
Wenn sich die Räder (L) und (R) unterschiedlich schnell bewegen, führt dies dazu, dass sich auch die Seitenräder (S) in ihrem jeweiligen Konus (K) drehen und dort Reibung verursachen. Diese Reibung bremst die Ausgleichsbewegung und verursacht die Sperrwirkung.
Die Reibung zwischen Konus (K) und Seitenrad (S) entsteht, sobald über (A) ein Antriebsmoment übertragen wird. Je höher das Antriebsmoment, um so höher die Reibungskräfte. Das Sperrmoment ist also ein Prozentsatz des Antriebsmomentes, weshalb man diesen Sperrentyp auch als Torque Sensing oder drehmomentfühlend bezeichnet.
Das SuperLSD hat eine Kegelverzahnung, so wie ein normales, offenes Differenzial. Wenn ein Antriebsmoment übertragen wird, müssen die Seitenräder sich nach außen bewegen, was aber für eine Kegelverzahnung schlecht ist. Nun können Kegelverzahnungen ohnehin nicht immer 100% geometrisch korrekt hergestellt werden, man nennt dies Toleranzen, die auch konstruktiv vorgesehen werden und die auf die Lebensdauer keinen Einfluss haben.
Allerdings dürfen die seitlichen Wege nicht zu groß werden, daher kann beim SuperLSD die Sperrwirkung nicht nurch weitere seitliche Platten vergrößert werden, da mehr Platten auch mehr seitlichen Weg bedeuten würden. Das SuperLSD ist deshalb konstruktiv auf relativ kleine Sperrwerte beschränkt.
Wenn das Fahrzeug in eine Kurve fährt, verhindert das Differenzial so lange die Ausgleichsbewegung, bis das Verhältnis der Drehmomente so groß geworden ist, das sie den Torque Bias überschreiten.
Wenn die Räder gegeneinander drehen (das Sperrdifferenzial die Ausgleichsbewegung zulässt), dann wird ein Teil des Drehmomentes auf das langsamere Rad umverteilt.
Drehmomentfühlendes Sperrdifferenzial
Der hier gezeigte Typ von TFS liefert auslegungsabhängig einen Torque Bias zwischen 1,5...2,1
Einsatz als Zentraldifferenzial oder als Achsdifferenzial
Maximale Sperrwirkung ist unabhängig von der Drehrichtung
Einfacher, kostengünstiger Aufbau. Als zusätzliche Kostenfaktoren in der Fertigung sind vor allem die Teilung des Differenzials zu nennen (offene Sperrdifferenziale werden ungeteilt gebaut und sind daher einfacher = kostengünstiger), die besondere Behandlung der Seitenräder (S) und des Konus (K).