
Bilder zum Vergrößern anklicken
|

Bild 1: Animiertes Helical LSD
|
|
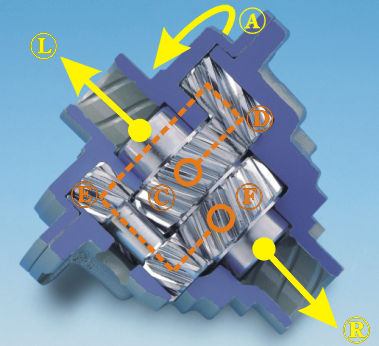
Bild 2: Mechanische Verbindung zwischen den Rädern*
|
|
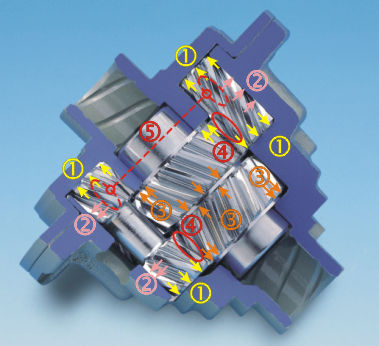
Bild 3: Reibung bei Bewegung*
|
|
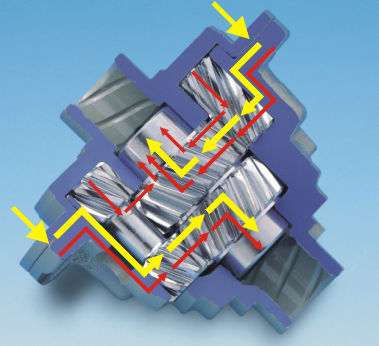
Bild 4: Fluss von Leistung und Drehmoment*
|
|
Bild 5: Offenes Stirnraddifferenzial als Basis für das Helical
Gear
|
|

Bild 6: Das GKN PowrTrak ist von ähnlicher Bauart wie das Helical
LSD*
|
|

Bild 7: Hier eine kompakte Ausführung des GKN PowrTrak*
|
| *= Bilder (auch nachbearbeitete ) mit
freundlicher Genehmigung der GKN. |
Helical LSD Sperrdifferenzial (Parallelachsendifferenzial)
Das Parallelachsendifferenzial (wegen der Schrägverzahnung im englischen
auch Helical Gear LSD genannt) Hersteller GKN / TFS ist im Aufbau den
Sperrdifferenzialen von JTEKT (Modell Torsen B), Quaife und GKN (PowrTrak,
Bild unten) recht ähnlich. Obwohl die Mechanik ein wenig undurchsichtig
scheint, ist das Prinzip recht einfach, wenn man sich die Grundidee vor
Augen hält:
-
Eine Sperre ist ein offenes Differenzial, dessen Wirkungsgrad
verschlechtert wurde, um die Ausgleichsbewegung zu bremsen
-
Die Basis für das Helical LSD ist das Stirnraddifferenzial
Die prinzipbedingte Reibung der Schraubenverzahnung (engl. helical gear)
erzeugt gegenüber einer Geradverzahnung zusätzliche Kräfte (wegen des
Schrägungswinkels der Verzahnung) die sich am Gehäuse abstützen und an den
Kontaktstellen erhöhte Reibung verursachen.
Funktionsbeschreibung
In der Beschreibung soll davon ausgegangen werden, dass diese Sperre in
einem Fahrzeug mit Heckantrieb eingebaut ist.
Bild 2:
-
Das Differenzial wird bei (A) angetrieben, dort befindet sich
beispielsweise ein Tellerrad, welches über eine Kardanwelle mit dem
Getriebe verbunden ist.
-
Die Räder werden über (L) und (R) angetrieben, dies sind die beiden
Ausgänge des Differenzials.
-
Der Kraftfluss geht vom Gehäuse zunächst auf die Planetenräder (D)
und (E) und von dort auf die Seitenräder (C) und (F).
-
Die Planetenräder (D) und (E) sind immer paarweise zusammengebaut -
dies ist in diesem Bild nicht zu sehen, das vor (D) liegende Zahnrad
viel dem Schnitt zum Opfer und das hinter (E) liegende Planetenrad ist
nicht zu sehen.
-
Wenn sich (D) dreht, überträgt es somit die Bewegung immer auf sein
benachbartes Planetenrad (E).
-
Wenn beide Räder gleich schnell auf der Fahrbahn abrollen, dann läuft
das Sperrdifferenzial als Block um, d.h. es bewegt sich im inneren des
Differenzials nichts. Die Verzahnungen (C), (D), (E) und (F) kämmen
nicht miteinander, es gibt also keine Reibung und 100% der Leistung
wird an die Räder übertragen.
-
Wenn sich die Räder (L) und (R) unterschiedlich schnell bewegen,
führt dies dazu, dass sich auch die Seitenräder (C) und (F)
unterschiedlich schnell drehen. Da (C) mit (D), (D) mit (E) und (E)
mit (F) kämmt, sind die Räder (L) und (R) über Verzahnungen verbunden,
können sich also nicht unabhängig voneinander drehen.
Bild 3 zeigt, wo die Schrägverzahnungen zu mehr Reibung führen:
-
Zunächst muss das gesamte Drehmoment vom Gehäuse auf die
Planetenräder übertragen werden. Da die Planetenräder (D) und (E)
nicht auf Achsen gelagert werden, drückt das Gehäuse über die
Zahnköpfe tangential auf die Planetenräder. Dadurch entsteht auf der
kleinen Fläche der Zahnköpfe ein großer Druck, der die
Ausgleichsbewegung hemmt.
-
Durch die Schräge in der Verzahnung entstehen Kräfte in (L) bzw. (R)
Richtung. Dadurch werden alle vier Zahnräder bei (1) und (3) gegen das
Gehäuse gedrückt und erzeugen bei Bewegung zusätzliche Reibung.
-
Durch die Schräge in der Verzahnung entstehen Kräfte nach außen.
Dadurch werden alle vier Zahnräder mit den Köpfen der Zähne radial in
die Taschen des Gehäuses (2) gedrückt und erzeugen bei Bewegung
zusätzliche Reibung.
-
Beim Abwälzen der Räder entsteht Gleitreibung an den Stellen (4) und
bei (5) zwischen den verbundenen Rädern (D) und (E).
-
Diese Reibung entsteht, sobald über (A) ein Antriebsmoment übertragen
wird. Je höher das Antriebsmoment, um so höher die Reibungskräfte. Das
Sperrmoment entspricht also einem prozentualen Anteil des
Antriebsmomentes, weshalb man diesen Sperrentyp auch als Torque
Sensing oder drehmomentfühlend bezeichnet.
Leistungs- und Drehmomentfluss
Bild 4 zeigt den Fluss der Antriebsmomente über das Gehäuse zu den
Planeten und von dort auf die Seitenräder.
-
Wenn beide Räder gleichschnell drehen, dann läuft das
Sperrdifferenzial als Block um, d.h. es gibt kein Wälzen zwischen den
Zahnrädern (C)-(D)-(E)-(F).
-
Wenn das Fahrzeug in eine Kurve fährt, verhindert das Differenzial so
lange die Ausgleichsbewegung, bis das Verhältnis der Drehmomente so
groß geworden ist, das sie den Torque Bias überschreiten. Dann gibt es
ein Losbrechen der Verzahnung und es entsteht Reibung und Wärme durch
die Ausgleichsbewegung.
-
Wenn die Räder gegeneinander drehen (das Sperrdifferenzial die
Ausgleichsbewegung zulässt), dann wird ein Teil des Drehmomentes auf
das langsamere Rad umverteilt. Das Verhältnis zwischen den
Drehmomenten erreicht dann den Wert des Torque Bias.
Bild 4 zeigt zwei Leistungsflüsse: Die gelben Pfeile zeigen den
Leistungs- und Drehmomentfluss bei gleichschnellen Rädern und gleicher
Drehmomentverteilung und die roten Pfeile zeigen den Fluss bei
unterschiedlichen Drehzahlen unter Last (also mit Antriebsmoment.
Dabei wird ein Teil der Drehmomente über die Reibkontakte an den Rädern
(D) und (E) übertragen, die sich zusätzlich auf die langsamere Seite
übertragen werden.
Herleitung aus dem Stirnraddifferenzial
Wenn es ein wenig undurchsichtig erscheint, kann die Funktion auch anders
erklären: Wie wird aus einem Stirnraddifferenzial
(Bild 5) mit gutem Wirkungsgrad ein Helical LSD mit schlechtem
Wirkungsgrad und damit guter Sperrwirkung?
Das geht in folgenden Schritten:
-
Die Planetenräder werden nicht mehr auf eigenen Drehachsen gelagert,
sondern vom Gehäuse über die Zahnköpfe angeschoben. Das gibt
zusätzliche Reibung zwischen Zahnköpfen und Gehäuse
= Differenzialkorb
-
Die Schrägverzahnung führt zu weiteren Kräften, die dazu führen, dass
sich die Planetenräder seitlich aus den Taschen herausschieben und
verkeilen wollen, dadurch entsteht wieder Reibung
-
Die Seitenräder werden ebenfalls von den Kräften der Schrägverzahnung
entweder ans Gehäuse oder gegeneinander gepresst.
-
Je nach Auslegung der Verzahnung können die Zähne beim Zahneingriff
auch aufeinander gleiten, statt nur abzuwälzen. Dies erzeugt dann
weitere Reibmomente.
Steckbrief
-
Drehmomentfühlendes (engl. torque sensing)
Sperrdifferenzial
-
Der hier gezeigte Typ von TFS liefert auslegungsabhängig einen Torque
Bias zwischen 2...3; Die Einstellung erfolgt über den Winkel der
Schraubenräder.
-
Einsatz als Zentraldifferenzial oder als Achsdifferenzial
-
Maximale Sperrwirkung kann drehrichtungsabhängig sein. Dazu kann man
z.B. die Anlaufscheiben beschichten oder ein Axialnadellager zwischen
die Seitenräder einsetzen.
-
Hängt ein Rad in der Luft, wird auf das andere Rad auch kein Moment
übertragen.
-
So lange Antriebsleistung übertragen wird, sperrt das Helical LSD,
unabhängig von der Drehzahldifferenz. Auch bei weiten Kurven führt das
dazu, dass das Differenzial das Fahrzeug wieder auf Geradeaus-Kurs
bringen will. Das Sperrdifferenzial fördert in diesem Fahrzustand ein
Untersteuern.
Bildgalerie Helical LSD
|

Bild 8: Kleines Planetenrad
|

Bild 9: Seitenrad und Planetenrad
|

Bild 10: Innereien eines Helical LSD
|