
Elektronische Sperrdifferentiale
|
Bild 1: US Patent 5326333, elektronisches Sperrdifferential
|
|

Bild 2: Solche oder ähnliche Kugelrampen werden heute in Kombination mit Reiblamellen
in der Mechanik vieler elektronischer Sperrdifferentiale eingesetzt. Sie ermöglichen
große Hebelübersetzungen.
|
|
Bild 3: Die Drehung der Kugelrampe führt zu einer Veränderung in der Höhe und drückt
die Lamellen zusammen.
|
|
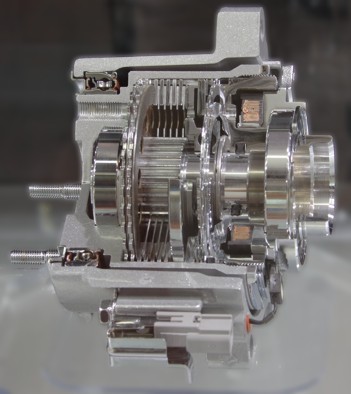
Bild 4: Schnittmodell einer elektronischen Sperre von JTEKT
|
Die meisten Sperrdifferentiale auf dieser Webseite gehören zur Gruppe der passiven
Sperren. Bei diesem Typ folgt die Sperrwirkung einfachen mechanischen Regeln.
Mit der Weiterentwicklung der Elektronik im Fahrzeug wird aber auch der Wunsch nach
elektronisch kontrollierbaren (aktiven) Sperren immer größer. Dies ist vor allem auf die
möglichen Regelstrategien zurückzuführen, die mit der Elektronik relativ einfach umgesetzt
werden können. Mit einem übergeordneten Fahrdynamik-Regler kann der aktuelle Zustand des
Fahrzeuges, der Fahrbahn und der Wunsch des Fahrers berücksichtigt werden.
Vorteile
In aktuellen Fahrzeugen bringen Helferlein Stabilitätsprogramme, Bremsassistenten und andere
Systeme schon eine Reihe von Sensoren mit, die Informationen über den Fahrerwunsch und das
Fahrzeug liefern. Der Lenkwinkelsensor am Lenkrad gibt an, wohin der Fahrer möchte, die
Drehzahlsensoren an den Rädern lassen erkennen, wie schnell das Fahrzeug und wie griffig die
Fahrbahn ist und ein weiterer Sensor zeigt, ob und wie schnell sich das Fahrzeug um seine
Hochachse (Gierachse) dreht. Wie schnell der Fahrer vom Gas geht, sagt dem System, ob eine
Panikbremsung bevorsteht. Daneben kann noch die Außentemperatur und der Regensensor abgefragt
werden.
Wie extrem eine Fahrdynamikregelung mit diesen Informationen das Fahrzeug beeinflussen kann,
zeigen die üblichen elektronischen Stabilitätsprogramme (ESC). Über den CAN-Bus können solche
Informationen auch von anderen Komponenten im Fahrzeug ausgewertet werden. Die folgende Liste
mit Beispielen zeigt, was ein aktives (elektronisches) Sperrdifferential im Vergleich zu einem
passiven Sperrdifferential damit anfangen könnte:
-
Passive Sperrdifferentiale können nur Unterschiede in Drehzahl oder Drehmoment erkennen.
Bei normaler Kurvenfahrt sperren diese Systeme, obwohl die Drehzahldifferenz zwischen den
Rädern notwendig ist. Die Sperre führt zu einem untersteuernden Verhalten, der Fahrer muss
also stärker in die Kurve lenken, als es dem Kurvenradius entspricht. Bei einer aktiven
Sperre erkennt der Fahrdynamik-Regler die normale Kurvenfahrt und öffnet die Sperre. Das
Eigenlenkverhalten des Fahrzeuges wird durch die aktive Sperre nicht in Richtung
Untersteuern verstärkt.
-
Bei Autobahnfahrt gibt es zwischen den Rädern nur eine geringe Differenzdrehzahl aber
eine hohe Fahrgeschwindigkeit. Wenn die aktive Sperre zugefahren wird, verbessert das den
Geradeauslauf, z.B. bei Seitenwind. Ein Fahrdynamik-Regler kann diese Situation erkennen,
ein drehmomentfühlendes Sperrdifferential wird entsprechend agieren, aber eine
drehzahlfühlende passive Sperre braucht dazu größere Differenzdrehzahlen.
-
Wenn am Fahrbahnrand Schnee oder nasses Laub liegt (am schlimmsten noch kombiniert mit
Anhänger an einer Steigung), wirkt eine drehzahlfühlende Sperre erst, wenn eine sichtbare
Differenzdrehzahl zwischen den Rädern vorliegt. Bei einer drehmomentfühlenden Sperre dreht
das Rad unter Umständen durch, wenn die Haftungsgrenze erreicht wird und das Fahrzeug
kommt nicht mehr voran. Eine elektronische Sperre kann diese spezielle Situation erkennen
und die Sperre so steuern, dass die Verluste im Sperrdifferential auf das notwendige
Minimum reduziert werden. Damit wird auch die Antriebsleistung so gut wie möglich
übertragen.
-
Wenn ein Rad durchdreht wird eine passive Sperre das Antriebsmoment auf das andere Rad
umverteilen. Wenn die Leistung so groß wird, dass beide Räder durchdrehen müssen, kann die
elektronische Sperre öffnen, so dass wenigstens ein Rad noch rollt und die Seitenführung
übernimmt. Beim passiven Sperrdifferential verliert unter Umständen die ganze Achse die
Seitenführung, wenn man zu viel Gas gibt.
-
Wenn die Fahrdynamikregler eingreifen werden kann die elektronische Sperre sofort
deaktiviert werden, so dass diese Systeme den Einfluss der Sperre nicht mehr
berücksichtigen müssen.
Es lassen sich zahlreiche weitere Situationen finden, in denen eine aktive Sperre wesentlich
hilfreicher ist, als eine passive Sperre. Ein System, dass mehr Informationen verarbeiten kann
ist eben immer im Vorteil. Aber diese Fähigkeiten haben auch ihren Preis, weshalb passive
Sperren nach wie vor beliebt sind.
Technik
Bei passiven Sperren ist die Technik einfach: Reibung bremst oder verhindert, dass sich die
verbundenen Räder mit unterschiedlicher Drehzahl drehen. Bei der aktiven Sperre muss diese
bremsende Reibung aber über einen Reibmechanismus einstellbar sein, so das die Reibung
möglichst weit zwischen den Extremen 'reibungsfrei' und 'verblocken' einstellbar ist. Dazu
wiederum finden sich auf dem Markt im Wesentlichen zwei Prinzipien:
-
Ein Prinzip zieht die dazu nötige Energie aus den beiden Abtriebswellen. Sobald sich
diese verdrehen, wird aus der Verdrehung Energie abgezweigt, um den Reibmechanismus zu
aktivieren. Die Energie, um den Reibmechanismus zu aktivieren, ist relativ gering und kann
aus der magnetischen Kraft einer Spule bezogen werden. Solche Systeme gab/gibt es von GKN
(Nissan Murano, Mistubishi Colt), JTEKT (vorm. Toyoda, Zexel) und BorgWarner (Hyundai).
-
Das andere Prinzip stellt den Reibmechanismus ganz mit Fremdenergie ein, z.B. mit einem
Elektromotor (z.B. GKN im Landrover Discovery oder Porsche Cayenne der ersten Generation,
VW Touareg, Magna Steyr im BMW X3/X5 der ersten generation) oder Hydraulik (z.B.
BorgWarner). Der Vorteil ist, dass der Reibmechanismus schon eingestellt werden kann,
bevor sich die Abtriebswellen bewegen, dafür muss aber etwas Leistung für die Fremdenergie
bereitgestellt werden.
Elektronische Sperren tragen vor allem in der Oberklasse zur Differenzierung der Hersteller
bei und werden in dieser Funktion bereits von Torque-Vectoring-Systemen überholt. Aufgrund des
technischen Aufwandes und der höheren Kosten kommen sie vor allem in Fahrzeugen der gehobenen
Klasse und bei Fahrzeugen, deren Motorleistung so hoch ist, dass sie ohne Hilfsmittel kaum
noch auf die Straße gebracht werden kann.