
Active Yaw oder Torque Vectoring
In der Fahrdynamik setzen sich zwei neue Begriffe durch, die das gleiche meinen: Sie heißen
'Active Yaw' (von engl. yaw = gieren) oder 'Torque Vectoring'.
 |
|
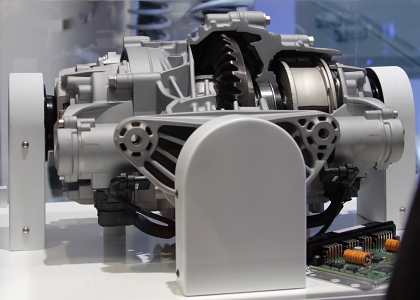
Bild 1: Torque Vectoring Einheit von GKN/ZF für BMW. Die Einheit
wird an der Hinterachse als komplettes Hinterachsgetriebe (statt Differential) verbaut
|
 |
|
Bild 2: Active Yaw Patent DE 10 2004 001 019,
Differentialgetriebe mit Reibkorb für Giermoment, Ralf Pfeifer
|
 |
|
Bild 3: Active Yaw Patent, DE 10 2005 040 253,
Differentialanordnung zur variablen Drehmomentverteilung, Ralf Pfeifer und Michael
Engelmann
|
Was ist Active Yaw?
Der Unterschied zu einem normalen Sperrdifferential besteht darin, dass ein Sperrdifferential
Drehzahlunterschiede angleichen kann und Antriebsmomente auf das langsamere Rad umleiten kann.
Aber prinzipbedingt kann es vorhandene Drehzahlunterschiede nicht vergrößern und es kann kein
Moment auf das schnellere Rad übertragen. Die aktuellen Active Yaw-Systeme bieten dagegen
folgende Vorteile:
- Die Funktion des Sperrdifferentials ist enthalten
- Das System wird elektronisch gesteuert, im Gegensatz zu einem rein mechanischen System
muss es also nicht aktiviert werden, wenn das System unerwünschte Effekte zeigen würde
- Drehmomente können zusätzlich auch zum schnelleren Rad übertragen werden,
In welchen Fahrzeugen gibt es Active Yaw?
1996 wurde der Mistubishi Lancer Evoultion vorgestellt, damals in der Version 6, der mit
diesem System an er Hinterachse ausgerüstet wurde. Um 2004 bietet auch Honda den Acura /
Legend mit seinem SH-AWD (Super Handling All Wheel Drive System) an.
Um 2008 wurde im BMW X6 das Active Yaw als 'Dynamic Performance Control' angeboten. Aufgrund
des hohen technischen Aufwandes sind Active-Yaw-Systeme (noch) nicht sonderlich verbreitet.
Den Active-Yaw-Systemen werden elektrische Stellantriebe (E-Motoren) und elektronische
Regelungen mitgegeben, während ein Sperrdifferential im einfachsten Fall (z.B. Super LSD)
technisch kaum von einem offenen Differential zu unterscheiden ist. Dadurch brauchen sie mehr
Bauraum und durch die höheren Kosten ist das System erst einmal in der automobilen Oberklasse
zu finden.
Welchen Einfluss hat Active Yaw?
Mit dem Active Yaw System kann man die Richtung des Fahrzeuges beeinflussen, und das ohne die
Lenkung selbst zu verwenden, wie dies bei Aktivlenkungen oder beispielsweise bei der aktiven
Hinterachskinematik des BMW
850 (E31, gebaut 19891999) oder aktuellen Hinterachslenkungen der Fall ist.
Während ein normales, offenes Differential die Antriebsmomente nur zu gleichen Teilen auf die
Räder verteilen kann, lenkt schon ein Sperrdifferential mit, indem z.B. bei niedrigen
Querbeschleunigungen (also bei Kurvenfahrt mit mäßigen Seitenkräften) das Fahrzeug stärker
untersteuert, als es mit dem offenen Differential üblich wäre. Auch ein normales ESC lenkt
mit, ohne auf die Lenkung zuzugreifen (neuere Verbundsysteme mit Eingriff in die Aktivlenkung
gibt es inzwischen), denn es bremst einzelne Räder ab, um ein schleuderndes Fahrzeug wieder in
die Richtung zu drehen, in die der Fahrer lenkt.
Mit einem elektronisch gesteuerten Active Yaw System kann ebenfalls gelenkt werden, indem die
Antriebsmomente ungleich auf die Räder verteilt werden. Dadurch kann mehr Moment zum
kurvenäußeren Rad gelenkt werden, so dass bei normalen Fahrbedingungen das Fahrzeug noch
genauer den Erwartungen, Wünschen und Fahrtrichtungsvorgaben des Fahrers folgt.
Wenn das Active Yaw die Funktion des Zentraldifferentials einnimmt, kann es die Momente
zwischen den Achsen umverteilen. So wäre es auf elektronischem Wege möglich, einen
Allradantrieb spontan vom gutmütigem Fronttriebler zu einem wedelfreudigen Hecktriebler zu
tunen.
Wie sieht die Technik aus?
Wenn man ältere Bilder von Mitsubishi oder die Pressemitteilungen von Honda sieht, dann war
der ursprünglich vorgestellte Aufbau eines Active Yaw schon ein beachtenswertes Stück
Maschinenbau.
Im wesentlichen funktioniert ein System für die Hinterachse so: Am Eingang des
Hinterachsdifferentials wird Leistung abgezweigt, die auf eine etwas schnellere und eine etwas
langsamere Welle übersetzt wird. Diese Wellen wiederum kann man über Kupplungen mit einer
Abtriebswelle zu einem Rad verbinden. Je nach dem, ob man die schnellere Welle oder die
langsamere Welle mit dem Rad verbindet, wird das Rad schneller und entsprechend das andere Rad
langsamer oder eben umgekehrt.
Eigentlich könnte man den Active Yaw Effekt sogar durch einen Bremseneingriff mit dem ESC
erzeugen, vorausgesetzt, die Steuersoftware ist dazu in der Lage. Mechanisch gesehen geht
dabei aber sehr viel Antriebsleistung in den Bremsen verloren, und das Fahrzeug würde eher
langsamer, so dass der Fahrspaß (im wahrsten Sinne des Wortes) auf der Strecke bliebe.
Wer entwickelt Active-Yaw-Systeme
Im Falle von Mitsubishi war die japanische TFS (inzwischen GKN Driveline) beteiligt, bei
Honda ist es vermutlich eine Eigenentwicklung, ein anderer Hersteller ist die ZF
Friedrichshafen und auch Magna Steyr entwickelt solche Systeme.
Lösung mit Kegelraddifferential
Die Lösung in Bild 2 wurde unter DE 102 004 001 019 "Differentialgetriebe mit
Reibkorb für Giermoment" zum Patent angemeldet.
Das System soll am Beispiel eines heckangetriebenen Fahrzeuges erläutert werden.
Der Antrieb erfolgt von der Kardanwelle über ein Kegelrad (1) auf ein Tellerrad (2), welches
seinerseits auf einem Differentialgehäuse (3) fest montiert ist. Das System sieht im
wesentlichen aus, wie ein ganz normales Kegelraddifferential. Die Achskegelräder S (mit den
Rädern des Fahrzeugs verbunden) sind unverändert, lediglich die Planetenräder (P) wurden mit
einer Hülse (4) versehen, so dass man sie über einen Reibring (5) auch von außen drehen kann.
Ohne Eingriff verhält sich die gesamte Einheit wie ein offenes Differential.
Nun kann man das Ganze wie ein Sperrdifferential nutzen: Wenn das linke Rad schneller dreht,
als das rechte Rad, dann verschiebt man die Gehäuseglocke (6) nach rechts, so dass der
Reibring (5) an der linken Seite der Glocke reibt und abgebremst wird. Entsprechend ist die
Gehäuseglocke nach links zu verschieben, wenn das rechte Rad zu schnell dreht.
Um das System als Active Yaw zu nutzen, geht man genau umgekehrt vor: Wenn das linke Rad
beschleunigt werden soll, dann verschiebt man die Gehäuseglocke (6) einfach nach links und
wenn das rechte Rad beschleunigt werden soll, dann verschiebt man die Gehäuseglocke (6) nach
rechts.
Ein besonderer Vorteil ist, dass durch geeignete Wahl der Durchmesser das Reibmoment
übersetzt werden kann, so dass man beispielsweise für 100 Nm Reibmoment am Reibring (5)
den Gegenwert von 200 Nm (oder mehr) an ein Rad leiten kann.
Lösung mit Stirnraddifferntial
Die Lösung in Bild 3 baut auf das Stirnraddifferential
auf und wurde beispielsweise als deutsches Patent DE 10 2005 040253 unter dem
Titel "Differentialanordnung zur variablen Drehmomentverteilung" angemeldet. Die Postfixe R
und L stehen für rechte (R) und linke (L) Seite.
Die Unterschiede zu einem Stirnraddifferential sind
-
Jedes der Planetenräder (beispielsweise 3) trägt einen verzahnten Kopf (5), der über ein
weiteres Zahnrad (Bremsrad, 6) mit den anderen in Eingriff steht.
-
Das Bremsrad (6) wiederum ist fest mit einem Innenlamellenträger (10) verbunden
-
Innenlamellenträger (10), Innenlamellen (9), Außenlamellen (8) und Außenlamellebnräger
(7) bilden zusammen die Kupplung (13), welche die Planetenräder (3) entweder auf der
rechten Seite (alle 3R) oder auf der linken Seite (3L) abbremst.
-
Der Außenlamellenträger (7) und die mit ihm verbundenen Außenlamellen (8) stehen still
Die Anornung kann nun so benutzt werden:
-
Active Yaw: Bremst man beispielsweise bei Geradeausfahrt die Lamellenkupplung
(13R) ab, so wollen die (bisher stillstehenden) Planetenräder auf dem Bremsrad (6)
abwälzen. Dies führt natürlich auch dazu, dass die Planetenräder (3R) und (3L) abwälzen
wollen, so dass Moment auf das linke Seitenrad (11L) übertragen wird.
-
Sperrdifferential: Wenn das rechte Seitenrad (11R) bereits schneller dreht, dann
drehen auch die Planetenräder (3L, 3R) um ihre Achsen. Bremst nun die Reiblamellenkupplung
(13R), dann wird das gegenläufig zum Seitenrad (11R) drehende Planetenrad (3R) in dieser
Drehbewegung um die eigene Achse gebremst und die Sperrwirkung der gesamten Einheit
beeinflusst die Fahrdynamik des Fahrzeuges.
-
Parkbremse oder Anfahrhilfe für Steigungen: Wenn Beide Kupplungen (13R, 13L)
geschlossen sind, wird das gesamte System gebremst.